Docker 原理三(镜像与分层)
概述
上一篇文章中提到了,rootfs 的存在将整个操作系统的文件和目录作为依赖打包进了容器中,使得容器具有了一个非常重要的特性:一致性。
难道我每开发一个应用,或者升级一下现有的应用,都要重复制作一次 rootfs 吗?比如,我现在用 Ubuntu 操作系统的 ISO 做了一个 rootfs,然后又在里面安装了 Java 环境,用来部署我的 Java 应用。那么,我的另一个同事在发布他的 Java 应用时,显然希望能够直接使用我安装过 Java 环境的 rootfs,而不是重复这个流程。
一种比较直观的解决办法是,我在制作 rootfs 的时候,每做一步“有意义”的操作,就保存一个 rootfs 出来,这样其他同事就可以按需求去用他需要的 rootfs 了。
Docker 镜像的分层
Docker 在镜像的设计中,引入了层(layer)的概念。也就是说,用户制作镜像的每一步操作,都会生成一个层,也就是一个增量 rootfs。
当然,这个想法不是凭空臆造出来的,而是用到了一种叫作联合文件系统(Union File System)的能力。Union File System 也叫 UnionFS,最主要的功能是将多个不同位置的目录联合挂载(union mount)到同一个目录下。
UnionFS
比如,我现在有两个目录 A 和 B,它们分别有两个文件:
$ tree
.
├── A
│ ├── a
│ └── x
└── B
├── b
└── x
然后,我使用联合挂载的方式,将这两个目录挂载到一个公共的目录 C 上:
|
|
这时,我再查看目录 C 的内容,就能看到目录 A 和 B 下的文件被合并到了一起:
$ tree ./C
./C
├── a
├── b
└── x
可以看到,在这个合并后的目录 C 里,有 a、b、x 三个文件,并且 x 文件只有一份。这,就是“合并”的含义。此外,如果你在目录 C 里对 a、b、x 文件做修改,这些修改也会在对应的目录 A、B 中生效。
Docker 分层的实现
我的环境是 Ubuntu 16.04 和 Docker CE 18.05,这对组合默认使用的是 AuFS 这个联合文件系统的实现。
可以通过 docker info 命令,查看到这个信息。
AuFS 的全称是 Another UnionFS,后改名为 Alternative UnionFS,再后来干脆改名叫作 Advance UnionFS。它是对 Linux 原生 UnionFS 的重写和改进。
对于 AuFS 来说,它最关键的目录结构在 /var/lib/docker 路径下的 diff 目录:
|
|
而这个目录的作用,我们不妨通过一个具体例子来看一下。
现在,我们启动一个容器,比如:
|
|
这时候,Docker 就会从 Docker Hub 上拉取一个 Ubuntu 镜像到本地。
这个所谓的“镜像”,实际上就是一个 Ubuntu 操作系统的 rootfs,它的内容是 Ubuntu 操作系统的所有文件和目录。不过,与之前我们讲述的 rootfs 稍微不同的是,Docker 镜像使用的 rootfs,往往由多个“层”组成:
|
|
可以看到,这个 Ubuntu 镜像,实际上由五个层组成。这五个层就是五个增量 rootfs,每一层都是 Ubuntu 操作系统文件与目录的一部分;而在使用镜像时,Docker 会把这些增量联合挂载在一个统一的挂载点上(等价于前面例子里的“/C”目录)。
这个挂载点就是 /var/lib/docker/aufs/mnt/,比如:
|
|
不出意外的,这个目录里面正是一个完整的 Ubuntu 操作系统:
|
|
Docker 镜像的三层结构
那么,前面提到的五个镜像层,又是如何被联合挂载成这样一个完整的 Ubuntu 文件系统的呢?
这个信息记录在 AuFS 的系统目录 /sys/fs/aufs 下面。
首先,通过查看 AuFS 的挂载信息,我们可以找到这个目录对应的 AuFS 的内部 ID(也叫:si):
|
|
即,si=972c6d361e6b32ba。
然后使用这个 ID,你就可以在 /sys/fs/aufs 下查看被联合挂载在一起的各个层的信息:
|
|
从这些信息里,我们可以看到,镜像的层都放置在 /var/lib/docker/aufs/diff 目录下,然后被联合挂载在 /var/lib/docker/aufs/mnt 里面。
而且,从这个结构可以看出来,这个容器的 rootfs 由如下图所示的三部分组成:
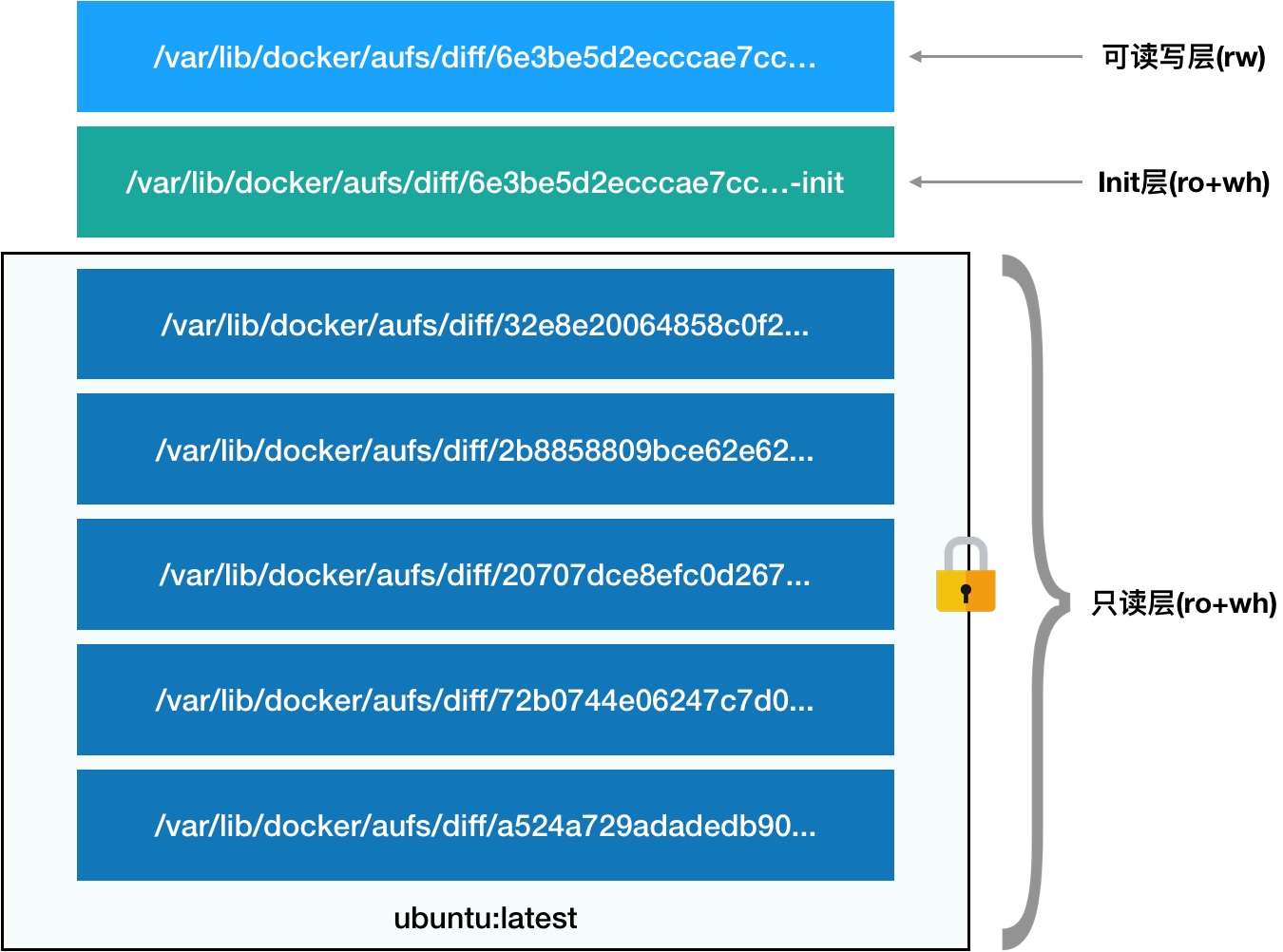
第一部分,只读层。
它是这个容器的 rootfs 最下面的五层,对应的正是 ubuntu:latest 镜像的五层。
可以看到,它们的挂载方式都是只读的(ro+wh,即 readonly+whiteout,至于什么是 whiteout,我下面马上会讲到)。
这时,我们可以分别查看一下这些层的内容:
|
|
可以看到,这些层,都以增量的方式分别包含了 Ubuntu 操作系统的一部分。
第二部分,可读写层。
它是这个容器的 rootfs 最上面的一层(6e3be5d2ecccae7cc),它的挂载方式为:rw,即 read write。在没有写入文件之前,这个目录是空的。而一旦在容器里做了写操作,你修改产生的内容就会以增量的方式出现在这个层中。
可是,你有没有想到这样一个问题:如果我现在要做的,是删除只读层里的一个文件呢?
为了实现这样的删除操作,AuFS 会在可读写层创建一个 whiteout 文件,把只读层里的文件“遮挡”起来。
比如,你要删除只读层里一个名叫 foo 的文件,那么这个删除操作实际上是在可读写层创建了一个名叫.wh.foo 的文件。这样,当这两个层被联合挂载之后,foo 文件就会被.wh.foo 文件“遮挡”起来,“消失”了。这个功能,就是“ro+wh”的挂载方式,即只读 +whiteout 的含义。我喜欢把 whiteout 形象地翻译为:“白障”。
所以,最上面这个可读写层的作用,就是专门用来存放你修改 rootfs 后产生的增量,无论是增、删、改,都发生在这里。而当我们使用完了这个被修改过的容器之后,还可以使用 docker commit 和 push 指令,保存这个被修改过的可读写层,并上传到 Docker Hub 上,供其他人使用;而与此同时,原先的只读层里的内容则不会有任何变化。这,就是增量 rootfs 的好处。
第三部分,Init 层。
它是一个以“-init”结尾的层,夹在只读层和读写层之间。Init 层是 Docker 项目单独生成的一个内部层,专门用来存放 /etc/hosts、/etc/resolv.conf 等信息。
需要这样一层的原因是,这些文件本来属于只读的 Ubuntu 镜像的一部分,但是用户往往需要在启动容器时写入一些指定的值比如 hostname,所以就需要在可读写层对它们进行修改。
可是,这些修改往往只对当前的容器有效,我们并不希望执行 docker commit 时,把这些信息连同可读写层一起提交掉。
所以,Docker 做法是,在修改了这些文件之后,以一个单独的层挂载了出来。而用户执行 docker commit 只会提交可读写层,所以是不包含这些内容的。
最终,这 7 个层都被联合挂载到 /var/lib/docker/aufs/mnt 目录下,表现为一个完整的 Ubuntu 操作系统供容器使用。
小结
通过“分层镜像”的设计,以 Docker 镜像为核心,来自不同公司、不同团队的技术人员被紧密地联系在了一起。而且,由于容器镜像的操作是增量式的,这样每次镜像拉取、推送的内容,比原本多个完整的操作系统的大小要小得多;而共享层的存在,可以使得所有这些容器镜像需要的总空间,也比每个镜像的总和要小。这样就使得基于容器镜像的团队协作,要比基于动则几个 GB 的虚拟机磁盘镜像的协作要敏捷得多。
更重要的是,一旦这个镜像被发布,那么你在全世界的任何一个地方下载这个镜像,得到的内容都完全一致,可以完全复现这个镜像制作者当初的完整环境。这,就是容器技术“强一致性”的重要体现。
参考
《深入剖析 Kubernetes》- 张磊
- 原文作者:范明勇
- 原文链接:https://blog.fanmuyong.com/post/Docker-%E5%8E%9F%E7%90%86%E4%B8%89%E9%95%9C%E5%83%8F%E4%B8%8E%E5%88%86%E5%B1%82/
- 版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 4.0 国际许可协议进行许可,非商业转载请注明出处(作者,原文链接),商业转载请联系作者获得授权。